2. 使用 OpenCV 进行相机标定
引言
随着 20 世纪末廉价针孔相机的引入,相机在我们的日常生活中变得司空见惯。不幸的是,这种廉价是有代价的:严重的失真;幸运的是,这些是常数,通过校准和一些重映射就可以纠正。此外,通过校准,你还可以确定相机的自然单位(像素)和真实世界单位(毫米)之间的关系。
原理
对于畸变,OpenCV 考虑了径向畸变和切向畸变。对于径向畸变系数,使用如下公式:
因此,对于在 (x, y) 坐标处未畸变的像素点,其在畸变图像上的位置将是 \((x_{distorted}, y_{distorted})\)。径向畸变的存在表现为桶或鱼眼效应。
发生切向畸变是因为图像拍摄镜头和成像平面不完全平行。它可以通过如下公式表示:
所以我们共有 5 个畸变参数,它们在 OpenCV 中表示为一个 5 列的行矩阵:
现在对于单位转换,我们使用如下公式:
这里 \(w\) 的存在是通过使用单应性坐标系统(并且 \(w=Z\))来解释的。未知的参数是 \(f_{x}\) 和 \(f_{y}\) (相机焦距) 以及 \((c_{x}, c_{y})\), 它们是以像素坐标表示的光学中心。如果在给定纵横比(通常为 1)的情况下对连个轴使用公共焦距,则 \(f_{y}=f_{x}*a\),并且在上述公式中,我们将有单个焦距 \(f\)。包含这四个参数的矩阵称为相机矩阵。尽管无论使用何种相机分辨率,畸变系数都是相同的,但这些应该与校准分辨率的当前分辨率一起缩放。
确定这两个矩阵的过程就是校准,即相机标定。这些参数的计算是通过基本的几何方程完成的。使用的方程式取决于所选的校准对象。目前 OpenCV 支持三种类型的对象进行校准。
- 经典的黑白棋盘
- 对称的圆形图案
- 非对称圆形图案
首先,你需要用相机拍摄这些标定板的快照,然后让 OpenCV 找到它们。每个找到的标定板都会产生一个新的方程。要求解方程,你至少需要预定数量的标定板快照来形成适合的方程组。这个数字对于棋盘板较高,而对于圆形板则较少。例如,理论上至少需要 2 个棋盘板的快照。然后,实际中我们输入的图像中存在大量噪声,因此未了获得良好的结果,你可能需要至少 10 个不同位置的输入模式的好的快照。
数据
如上所述,我们至少需要 10 个测试标定板图片才能进行标定。OpenCV 附带了一些棋盘图像(参见 samples/data 中的 left01.jpg-left14.jpg 或 right01.jpg-right14.jpg),我们将以此为例完成标定工作。
考虑一个棋盘的图像:相机标定所需的重要输入数据是一组 3D 真实世界点以及图像中这些点对应的 2D 坐标。二位图像点以及它们的坐标是很容易获得的,例如棋盘中两个黑色方块相互接触的位置,即棋盘的角点。但来自真实世界空间的 3D 点呢?
我们知道这些图像都是由静态相机拍摄的,棋盘放置在不同的位置和方向,所以我们需要知道 \((X, Y, Z)\) 的值。简单起见,我们可以说棋盘平面与 XY 平面重合(因此\(Z\)始终为 0)并且相机相应地移动。这种考虑有助于我们找到 X、Y 的值。
现在对于 X、Y 的值,我们可以简单地将点定义为 \((0, 0)\),\((1, 0)\),\((2, 0)\),...这表示点的位置。在这种情况下,我们得到的结果将是棋盘格大小的比例。但如果我们知道棋盘格的大小(例如 30mm),我们就可以得到角点的坐标 \((0, 0)\)、\((30, 0)\)、\((60, 0)\), ...因此,我们得到以 mm 为单位的结果。
我们这里做一个简单的定义:
- 3D 点称为
object points - 2D 点称为
image points
方法
角点检测
我们可以使用 cv.findChessboardCorners() 来检测棋盘中的角点。该函数需要传递待检测的角点网格尺寸,例如 8x8,5x5 等,在这里,我们使用的是 7x6 的网格。如果检测到了标定板,该函数的返回值 retval 将为 True,并且按照从左到右,从上到下的顺序返回角点坐标。
import cv2 as cv
cap = cv.VideoCapture("https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left01.jpg")
ret, img = cap.read()
cap.release()
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
ret, corners = cv.findChessboardCorners(gray, (7, 6), None)
if ret:
print(len(corners))
print(corners[0])
精调角点
一旦我们找到了角点,我们可以使用 cv.cornerSubPix() 来提高它们的检测精度。其中输入参数 criteria 中的 30 代表棋盘格的大小是 30mm,请根据实际使用的棋盘格大小进行修改。
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
corners2 = cv.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
print(len(corners2))
print(corners2[0])
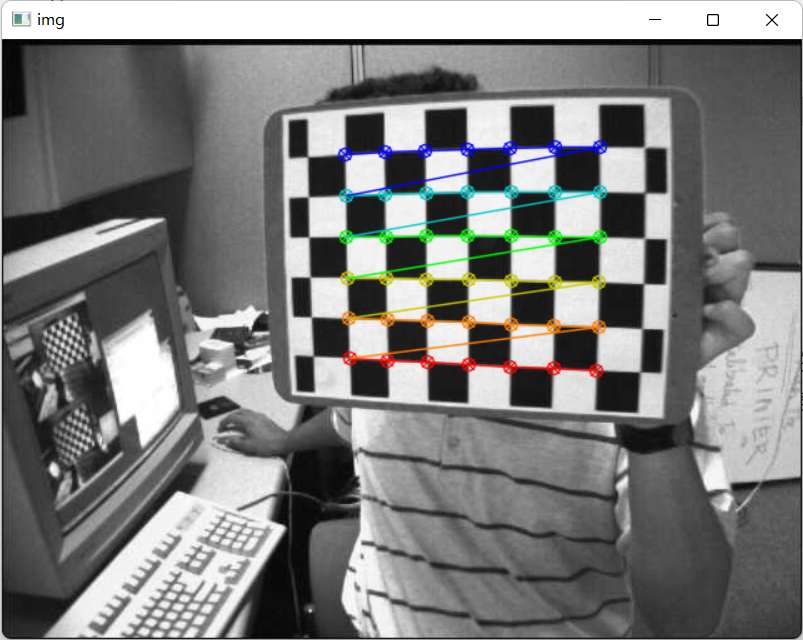
绘制角点
为了更直观地显示,我们也可以使用 cv.drawChessboardCorners() 函数在标定板图像上画出检测的效果。
cv.drawChessboardCorners(img, (7,6), corners2, ret)
cv.imshow('img', img)
cv.waitKey(3000)
cv.destroyAllWindows()
相机标定
现在我们已经获取了 3D 点及其对应的 2D 点,可以开始标定了。OpenCV 为我们提供了一个名为 cv.calibrateCamera() 的标定函数,该函数返回相机内参,畸变系数以及平移和旋转矩阵。
import os
import numpy as np
import cv2 as cv
# termination criteria
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6 * 7, 3), np.float32)
objp[:, :2] = np.mgrid[0:7, 0:6].T.reshape(-1, 2)
# Arrays to store object points and image points from all the images.
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = [
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left01.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left02.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left03.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left04.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left05.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left06.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left07.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left08.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left09.jpg",
# "https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left10.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left11.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left12.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left13.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left14.jpg",
]
for fname in images:
cap = cv.VideoCapture(fname)
_, img = cap.read()
cap.release()
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv.findChessboardCorners(gray, (7, 6), None)
# If found, add object points, image points (after refining them)
if ret == True:
objpoints.append(objp)
corners2 = cv.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
imgpoints.append(corners)
# Draw and display the corners
cv.drawChessboardCorners(img, (7, 6), corners2, ret)
cv.imshow("img", img)
cv.waitKey(500)
else:
print(f"No chessboard corners found on {os.path.basename(fname)}")
cv.destroyAllWindows()
ret, mtx, dist, rvecs, tvecs = cv.calibrateCamera(
objpoints, imgpoints, gray.shape[::-1], None, None
)
for i in [ret, mtx, dist, rvecs, tvecs]:
print(i)
No chessboard corners found on left09.jpg
No chessboard corners found on left11.jpg
0.15538409258957786
[[534.07030357 0. 341.53371884]
[ 0. 534.11757431 232.94773329]
[ 0. 0. 1. ]]
[[-2.93007785e-01 1.07836472e-01 1.31038070e-03 -3.28749062e-05
4.35604038e-02]]
(array([[-0.43241767],
[ 0.25604797],
[-3.08831444]]), array([[ 0.41531175],
[ 0.65664479],
[-1.33734835]]), array([[-0.2645208 ],
[-0.39360007],
[-2.74787505]]), array([[-0.37844212],
[-0.18063697],
[-3.11615802]]), array([[-0.4599379 ],
[-0.31419331],
[-1.76122276]]), array([[-0.29980156],
[ 0.39215116],
[-1.43481921]]), array([[-0.32033656],
[ 0.15981303],
[-1.2414933 ]]), array([[-0.4588325 ],
[-0.0884846 ],
[-1.33510646]]), array([[-0.35367558],
[-0.24362936],
[-1.56874269]]), array([[ 0.30697337],
[ 0.50386616],
[-1.82824676]]), array([[-0.17288075],
[-0.46764562],
[ 1.34745207]]))
(array([[ 3.79739078],
[ 0.89890502],
[14.85918859]]), array([[-2.12418024],
[ 1.84546529],
[12.81228885]]), array([[3.03686434],
[2.74652628],
[9.9000067 ]]), array([[ 2.82321448],
[ 2.2237018 ],
[10.95754837]]), array([[-1.13990594],
[ 2.67421242],
[ 9.56288866]]), array([[ 1.60363654],
[ 3.812898 ],
[16.12044348]]), array([[-5.94285225],
[ 2.39622779],
[16.77860668]]), array([[-3.27915844],
[ 2.15806524],
[11.72830983]]), array([[-2.89984544],
[ 2.62062587],
[10.57696908]]), array([[-1.2233786 ],
[ 3.52133324],
[15.67312184]]), array([[ 1.81889575],
[-4.26433773],
[12.45721009]]))
total error: 0.02368964343540968
相机标定函数的返回值解释如下:
ret:标定误差(RMS 重投影误差,在 0.1~1.0 之间说明结果较好,等于 1 表示重投影点和实际像素点的平均距离是 1 个像素)mtx:相机内参dist:畸变系数rvecs:相机坐标系到世界坐标系的旋转矩阵(相机外参)tvecs:相机坐标系到世界坐标系的平移矩阵(相机外参)
纠正畸变
上一步我们已经完成了相机标定的工作了,接下来可以取一张图片作为输入并纠正它的畸变。OpenCV 也提供了一个畸变矫正的函数 cv.undistort() 可直接调用。
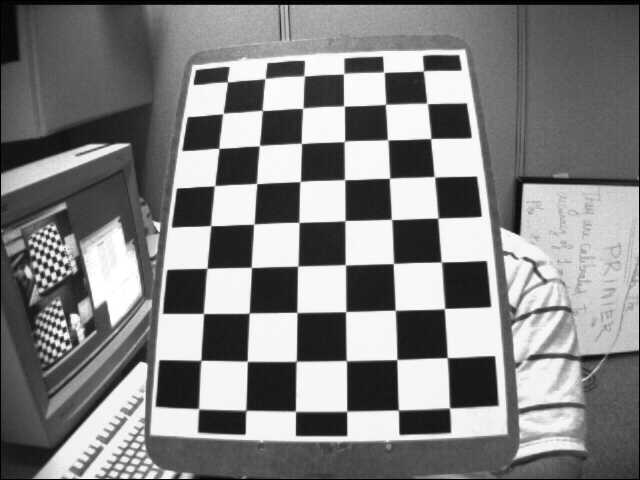
但首先,我们最好使用 cv.getOptimalNewCameraMatrix() 根据自由缩放参数来优化相机矩阵。如果缩放参数 alpha=0,则返回具有最少不需要像素的未失真图像,所以它甚至可能会删除图像角落或边缘的一些像素。如果 alpha=1,在原图的基础上会添加一些黑边。此外,该函数还会返回一个可用于裁剪的图像 ROI。这里,我们以 left12.jpg 为例展示纠正效果。
{kind=link}
| 纠正前 | 纠正后(未裁剪) | 纠正后(裁剪) |
|---|---|---|
 |
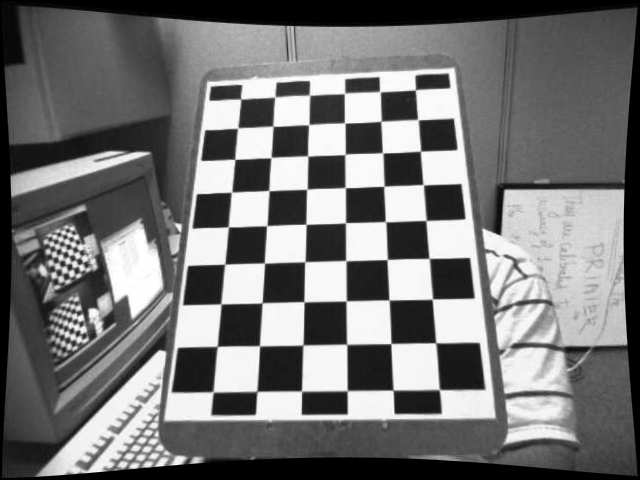 |
 |
提示
如果想维持原图大小,不希望裁剪,可以注释上述 8,9 两行的代码。此外,cv.undistort()=cv.initUndistortRectifyMap()+cv.remap,所以你也可以将纠正步骤拆解为两步,即先求解变换矩阵,然后再进行重投影,当有多张图片需要进行畸变纠正时,我们仅需要求解一次变换矩阵,这有助于提高程序的性能。
image_list = [
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left12.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left13.jpg",
"https://cdn.delivr.net/gh/opencv/opencv@4.x/samples/data/left14.jpg",
]
w, h = 640, 480
newcameramtx, roi = cv.getOptimalNewCameraMatrix(mtx, dist, (w, h), 1, (w, h))
mapx, mapy = cv.initUndistortRectifyMap(mtx, dist, None, newcameramtx, (w, h), 5)
for idx, fname in enumerate(image_list):
cap = cv.VideoCapture(fname)
_, img = cap.read()
cap.release()
dst = cv.remap(img, mapx, mapy, cv.INTER_LINEAR)
# crop the image
x, y, w, h = roi
dst = dst[y : y + h, x : x + w]
cv.imwrite(f"calibresult_{idx+1}.png", dst)
评估指标
除上述标定函数计算返回的 ret (RMS)外,我们也可以使用重投影误差(MSE)作为我们的评估指标。该指标可以很好地反映标定的精度。值越接近 0,说明标定的精度就越高。
这里我们已经通过标定求出了相机内参、畸变系数、旋转矩阵和平移矩阵,我们先要使用 cv.projectPoints() 将 3D 点转换为 2D 点。然后,通过变换得到的值与角点检测算法得到的值计算绝对范数。为了找到平均误差,我们需要计算所有标定图像计算误差的算术平均值。
mean_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv.norm(imgpoints[i], imgpoints2, cv.NORM_L2) / len(imgpoints2)
mean_error += error
print("total error: {}".format(mean_error / len(objpoints)))
拓展
除棋盘板外,OpenCV 也支持使用圆孔板进行相机标定的,对应的圆孔检测函数是 cv.findCirclesGrid(),其他操作基本完全一样。
参考
- OpenCV Tutorials->Camera calibration and 3D reconstruction (calib3d module)->Camera calibration With OpenCV
- OpenCV-Python Tutorials->Camera Calibration and 3D Reconstruction->Camera Calibration
- OpenCV 相机校正过程中,calibrateCamera 函数 projectPoints 函数的重投影误差的分析
- Meaning of the retval return value in cv2.CalibrateCamera